



















Chapter 3 Tuning Servo Systems
NI-Motion User Manual 3-2 ni.com
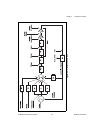
A properly tuned servo system exhibits overshoot as shown in Figure 3-1.
Figure 3-1. Properly Tuned Servo Motor Behavior
The amount of time required for the motors to settle on the commanded
position is called the settling time. By tuning the servo motors, you can
affect the settling time, the amount of overshoot, and various other
performance characteristics.
Control Loop
NI motion servo control uses control loops to continuously correct errors in
position and velocity. You can configure the control loop to perform a
Proportional, Integral and Derivative (PID) loop or a more advanced
control loop, such as the velocity feedback (PIV) or velocity feedforward
(PIVff) loops.
Commanded
Position
Overshoot
Time
0
Settling Time