Commander GP User Guide
Issue code: gpxu2
Setting Up the Drive 3-33
3.8 Macro 5
PID (set-point control)
Features
Specific features
PID control is used for applications where a process
is required to be maintained at a set-point. Typical
applications are as follows:
• Closed-loop tension-control processes
where a dancer-arm is used
• Closed-loop pressure-control systems
Selection can be made between PID and analog
frequency control. When PID control is selected,
the three analog inputs are configured as follows:
• Frequency reference to define the frequency
demand
• PID feedback from the feedback device
• PID reference to define the set-point
The dynamic performance, scaling and range of the
PID control can be adjusted.
Two preset references and an optional software
PID-enable can be used.
Standard features
• Macro 5 operates in Terminal mode only
• Digital control by RUN FORWARD and
RUN REVERSE contacts
• Analog frequency inputs
• Adjustment of acceleration and deceleration
ramps
• Negative logic for the digital inputs
• SPEED and TORQUE analog outputs
• AT SPEED digital output
• External trip digital input
• Drive RESET digital input
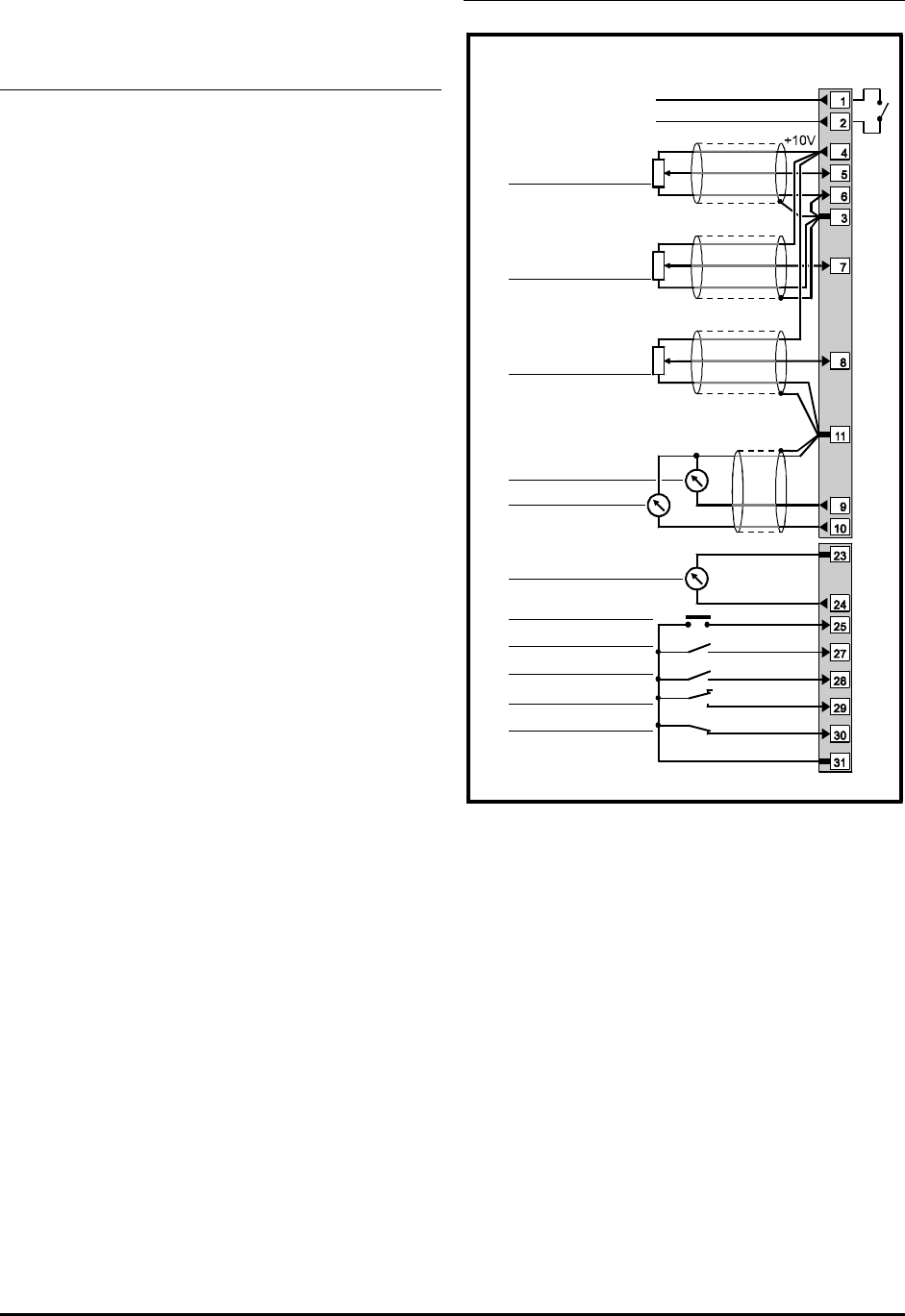
Signal connections for Macro 5
Status relay
Drive healthy
Frequency
reference 1 (0 ~ 10V)
PID feedback
TORQUE
0V common
PID reference
(0 ~ 10V)
AT SPEED
RESET
RUN FORWARD
RUN REVERSE
PID ENABLE
External trip
0V common
0V common
PID CONTROL
FREQUENCY CONTROL
0V common
SPEED
Signal
connector
Figure 3–13 Control signal connections
for Macro 5
For electrical specifications, refer to Appendix C
Signal Connections.























































































































