Commander GP User Guide
Issue code: gpxu2
D-8 Menu 0 Parameters
D.3 Parameters specific
to the macro configurations
Since parameters 0.11 to 0.30 are specific to
individual macros, most parameter numbers appear
more than once in this section, but with different
names; these are variants on the parameter number.
For guidance, a table headed Applicable to Macros...
appears for each parameter variant. (In places, the
listing is not able to be in strict numerical order.)
A table at the end of this appendix shows the
variants for all the macros (except Macro 1 which
does not use these parameters).
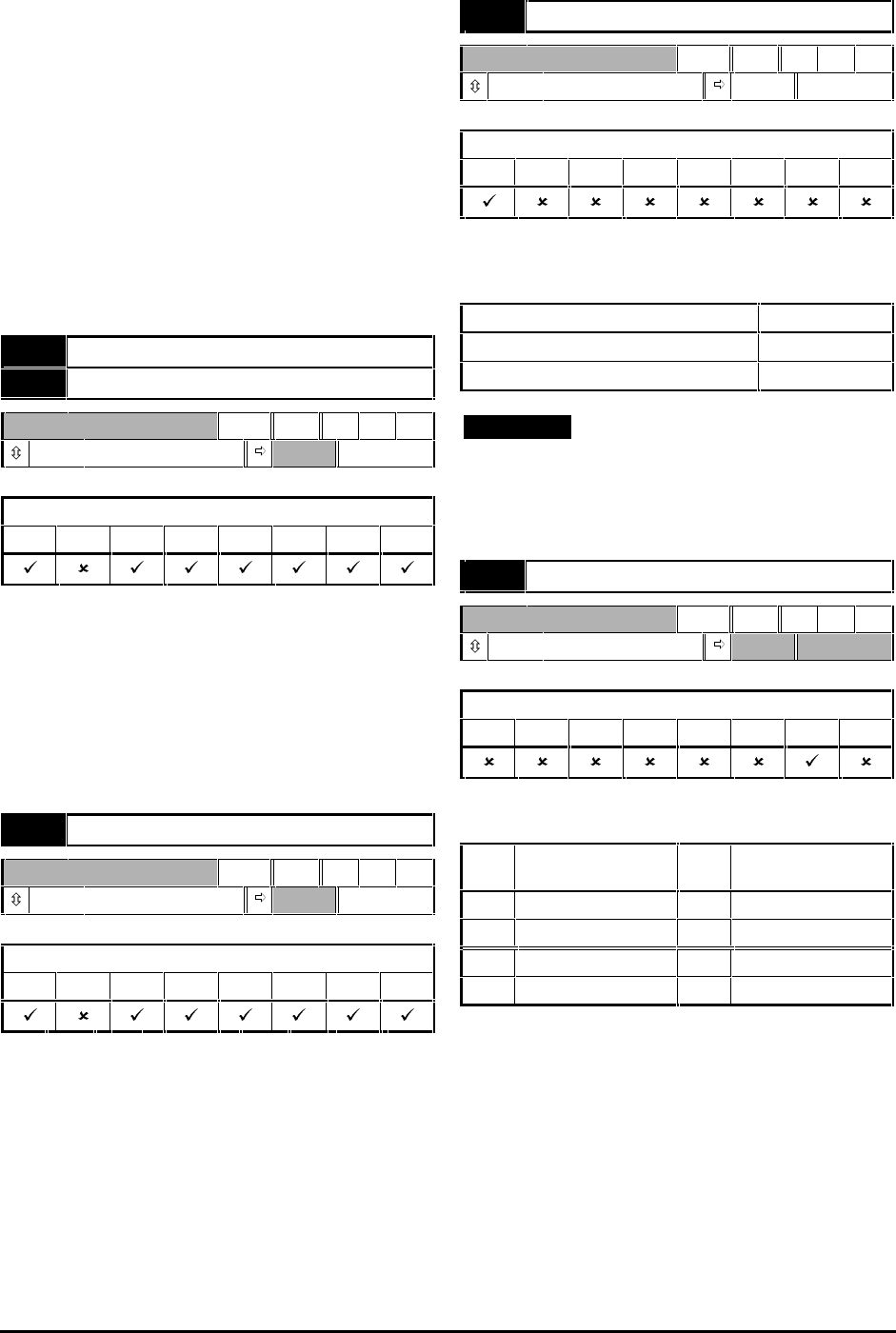
0.11 Pre-ramp reference
0.12 Post-ramp reference
RO Bi
±1000.0
HZ
Applicable to Macros...
01234567
When the frequency is constant, [0.12] = [0.11].
During acceleration and deceleration, the two
values may differ.
[0.12] differs from [0.11] also under either of the
following conditions:
• When the Drive is in current limit
• During braking in a standard ramp (Stnd.Hd
or Std.Ct) mode.
0.13 Motor active-current
RO Bi
±FLC
A
Applicable to Macros...
01234567
When the motor is being driven below its rated
speed, the torque is proportional to [0.13].
0.14 Jog reference
RW Uni
0 ~ 400.0 1.5 Hz
Applicable to Macros...
0123
567
Enter the required value of jog frequency. The
frequency limits affect the Drive when jogging as
follows:
Frequency-limit parameter Limit applies
0.01 Minimum frequency
No
0.02 Maximum frequency
Yes
Note
So that jog can be selected, the Drive must
be operated in either Macro 0 or Macro 1
and in Terminal mode.
0.14 Limit forward indicator
RO Bit P
0 ~ 1
Applicable to Macros...
0123
567
0.14 indicates the state of the LIMIT FORWARD
contact, as follows:
0.21 LIMIT FORWARD
contact
Condition
0 Open
Limit not reached
0 Closed
Limit reached
1 Closed
Limit not reached
1 Open
Limit reached























































































































