



















59
2 Mode de fonctionnement
FR
2 Mode de fonctionnement
2.1 Principe de fonctionnement
En achetant l'aspirateur robot « Spider »,
vous avez fait l'acquisition d'un aspirateur ro-
bot entièrement automatique.
Votre aspirateur robot alterne trois modes de
nettoyage pendant son cycle de fonctionne-
ment :
Mode « Aléatoire » (Fig. 4/A, Fig. 5/B)
Mode « Spirale » (Fig. 4/B)
Mode « Long des murs » (Fig. 5/A)
Si l'aspirateur n'est pas arrêté à la fin du mode
« Long des murs », il recommence un cycle
de fonctionnement en mode « Aléatoire ».
Cette séquence de fonctionnement permet de
nettoyer en passant sur des pistes chevau-
chantes sans oublier aucune zone, à condi-
tion cependant que la pièce ne soit pas trop
grande et que l'aspirateur ne rencontre pas
d'obstacle trop tôt quand il est en mode
« Spirale ».
Si l'aspirateur rencontre un obstacle, la bande
anticollision l'enregistre et modifie la direction
du déplacement. Si l'aspirateur rencontre un
obstacle quand il est en mode « Spirale », il
passe automatiquement en mode « Long des
murs ».
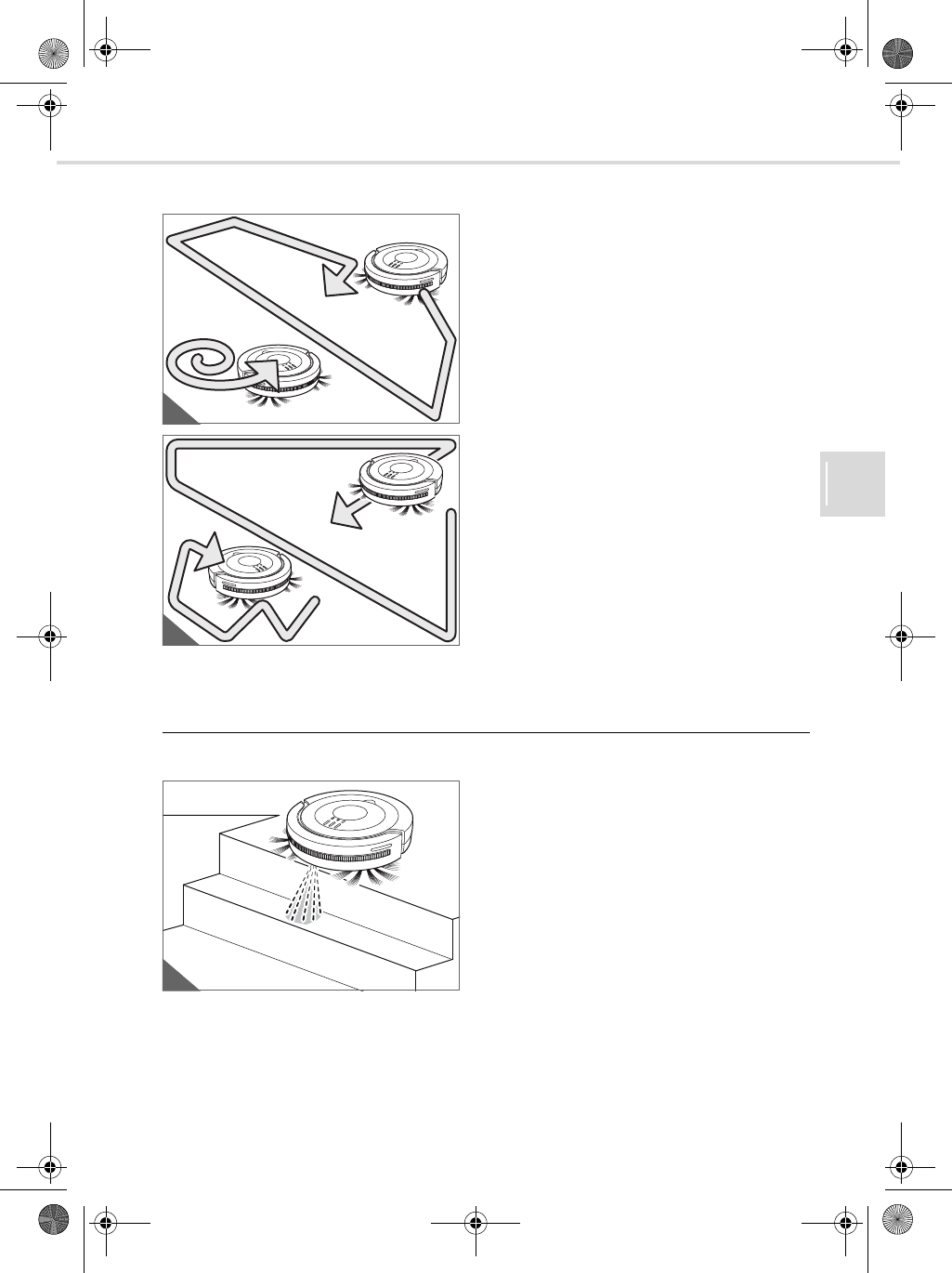
2.2 Protection antichute
Grâce à 3 capteurs, votre aspirateur robot dé-
tecte automatiquement les vides où il y a
risque de chute (Fig. 6). Il change alors la di-
rection de son déplacement et poursuit le net-
toyage dans la direction opposée.
Ainsi, les surfaces situées en contrebas,
comme les marches d'escalier par exemple,
sont détectées et ne seront pas nettoyées.
Vous pouvez régler la sensibilité des cap-
teurs, Chapitre 6.1, "Réglage de la
sensibilité des capteurs".
A
B
4
A
B
5
6
M607.book Seite 59 Dienstag, 18. Juni 2013 10:44 10