



















137
2 Funzionamento
IT
2 Funzionamento
2.1 Operatività
Con il robot aspirapavimenti „Spider“ avete
acquistato un robot aspirapavimenti dal fun-
zionamento interamente automatico.
Durante la pulizia il robot opera nelle tre mo-
dalità seguenti:
„Modalità random“ (Fig. 4/A, Fig. 5/B)
„Modalità a trottola“ (Fig. 4/B)
„Modalità angoli“ (Fig. 5/A)
Se l'apparecchio non viene spento al termine
della „modalità angoli“ il ciclo ricomincia con la
„modalità random“.
Questa sequenza di programmi consente una
pulizia senza soluzione di continuità a strisce
sovrapposte. La premessa è che l'ambiente
non sia troppo grande e che nella „modalità a
trottola“ l'apparecchio non si scontri troppo
presto con un ostacolo.
Se l'apparecchio si scontra con un ostacolo il
paraurti registra ciò e cambia direzione di
marcia. Se l'apparecchio si scontra con un
ostacolo quando è nella „modalità a trottola“
passa immediatamente alla „modalità angoli“.
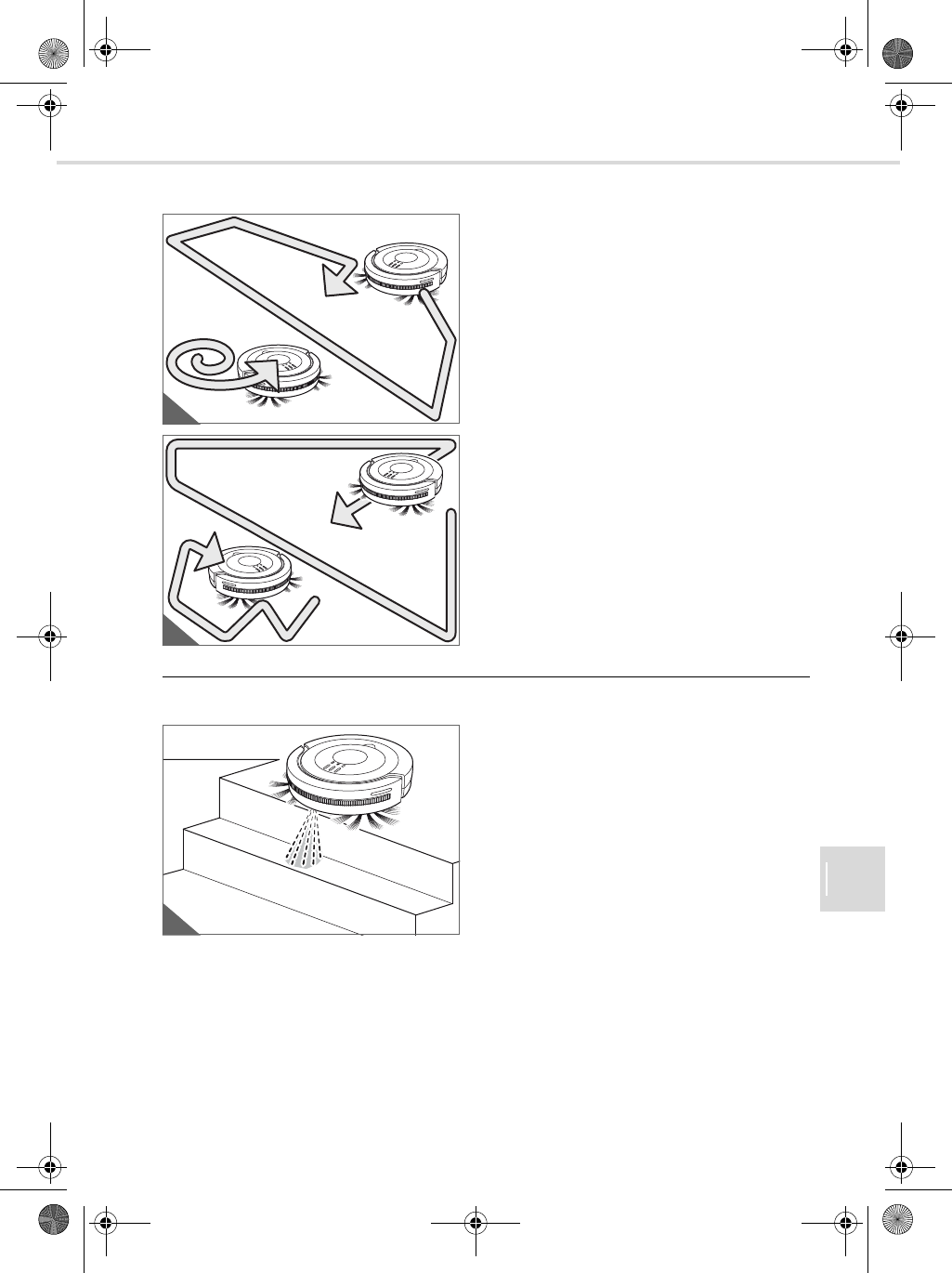
2.2 Protezione dalle cadute
Il robot aspirapavimenti riconosce autonoma-
mente mediante tre sensori di caduta even-
tuali dislivelli presenti davanti ad esso (Fig. 6).
In questo caso cambia direzione di marcia e
continua a pulire nella direzione opposta.
Eventuali superfici ribassate, come ad es. i
gradini, sono riconosciute ed escluse dalla
pulizia.
E' possibile regolare la sensibilità dei sensori
di caduta, Capitolo 6.1, "Regolare la
sensibilità dei sensori di caduta".
A
B
4
A
B
5
6
M607.book Seite 137 Dienstag, 18. Juni 2013 10:44 10