



















163
2 Fonksiyon şekli
TR
2 Fonksiyon şekli
2.1 Çalışma şekli
Süpürme Robotu "Spider"yu alarak tam oto-
matik çalışan bir süpürme robotu edinmiş ol-
dunuz.
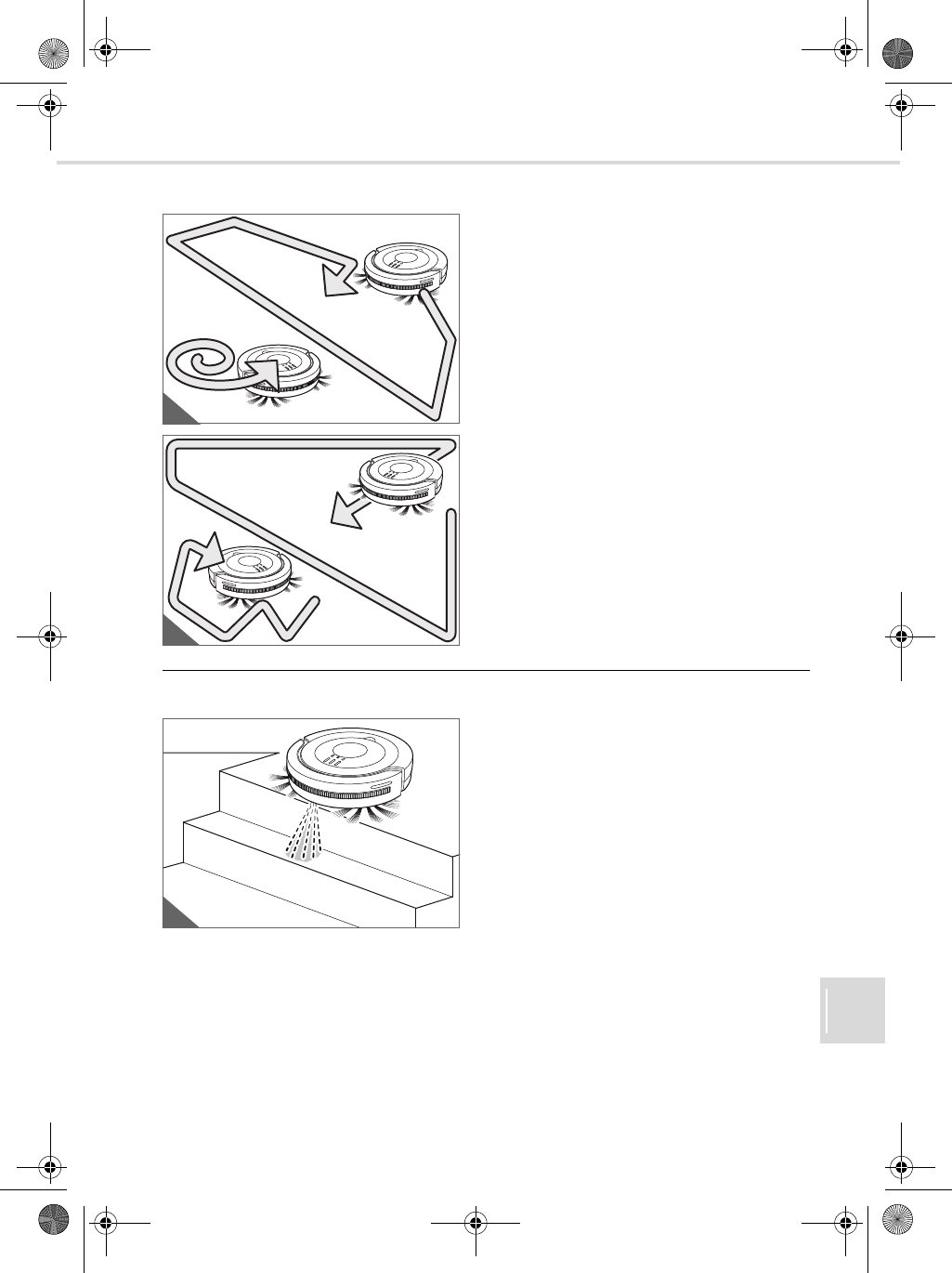
Robotunuz temizlik işlemi esnasında 3 modda
çalışır:
"Rasgele modu“ (Res. 4/A, Res. 5/B)
"Dairesel mod" (Res. 4/B)
"Kenar modu" (Res. 5/A)
Eğer cihaz, "kenar modu" sonunda kapatı l-
mazsa, tekrar aynı döngü "rasgele moduyla"
başlar.
Bu program sırası, üst üste binen hatlar teme-
linde aralıksız temizliğe imkan tanır. Bunun
için önkoşul, odanın çok büyük olmaması ve
cihazın "dairesel modda" çok erken bir engele
denk gelmemesidir.
Eğer cihaz bir engele çarparsa, darbe koruyu-
cu bunu kaydeder ve hareket yönü değişir.
Eğer cihaz "dairesel modda" bir engele denk
gelirse, hemen "kenar moduna" geçer.
2.2 Düşme emniyeti
Süpürme robotunuz, 3 düşme sensörü yardı-
mıyla kendiliğinden önündeki düşük zeminleri
tanır (Res. 6) Bunun üzerine hareket yönünü
değiştirir ve aksi yönde temizliğine devam
eder.
Örneğin merdiven basamakları gibi derinde
kalan yüzeyler algılanır ve böylece temizlik dı-
şında tutulur.
Düşme sensörlerinin hassasiyetini ayarlaya-
bilirsiniz, Bölüm 6.1, "Düşme sensörlerinin
hassasiyetini ayarlayın".
A
B
4
A
B
5
6
M607.book Seite 163 Dienstag, 18. Juni 2013 10:44 10