



















33
2 Functionality
GB
2 Functionality
2.1 Mode of operation
With the "Spider" robot vacuum you have pur-
chased a robot vacuum that works fully auto-
matically.
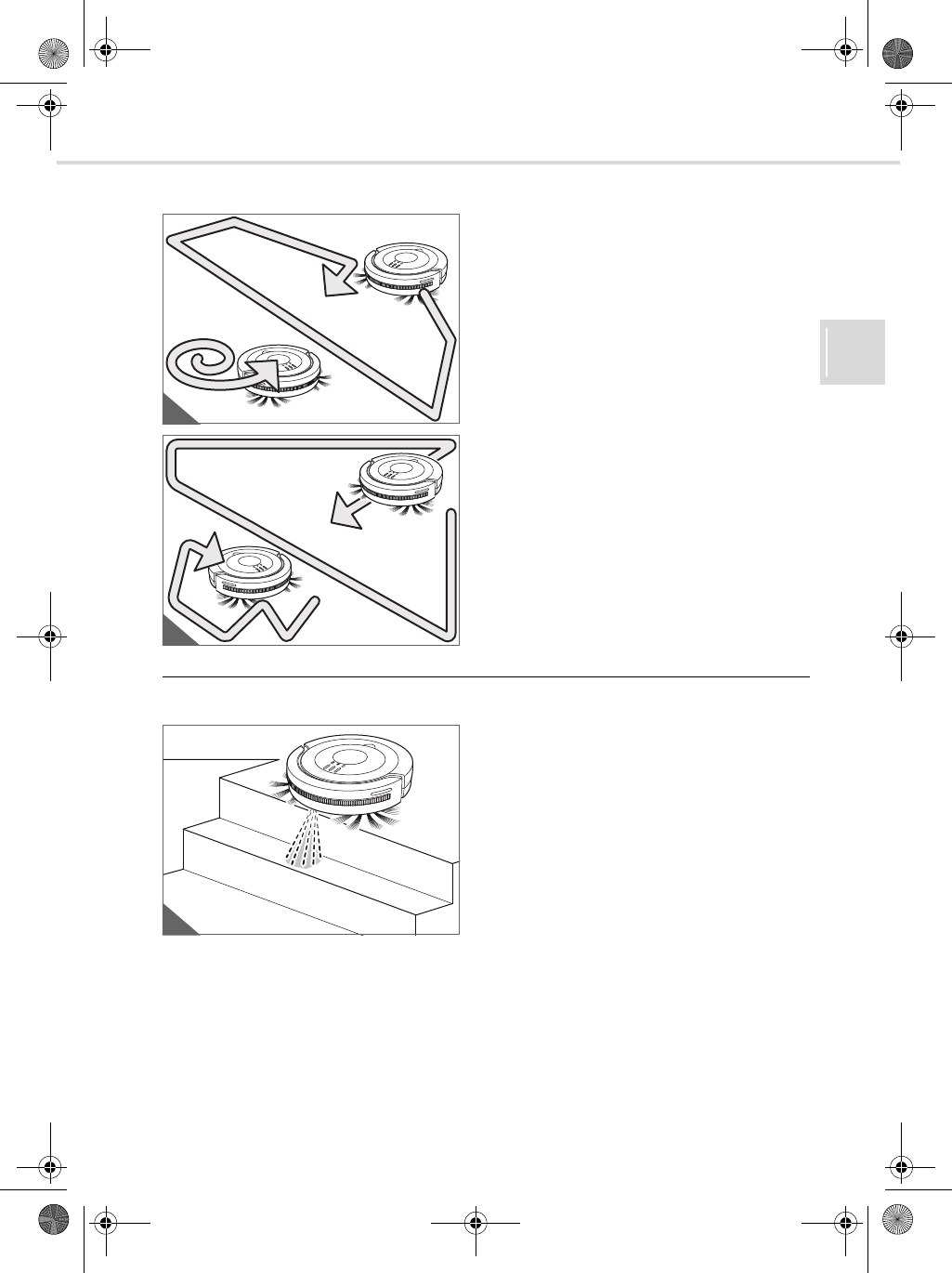
When cleaning, your robot runs through the
following 3 modes:
"Random mode" (Fig. 4/A, Fig. 5/B)
"Gyro mode" (Fig. 4/B)
"Edge mode" (Fig. 5/A)
If the appliance does not switch off at the end
of "edge mode" the cycle starts over again
with "random mode".
This program sequence enables seamless
cleaning on the basis of overlapping paths.
The prerequisites in this regard are that the
room must not be too large, and that the appli-
ance does not encounter an obstacle too soon
in "gyro mode".
If the appliance encounters an obstacle, the
bumper registers this and it changes the di-
rection of travel. If the appliance encounters
an obstacle in "gyro mode” it immediately
transitions to "edge mode".
2.2 Fall safeguard
With the aid of 3 fall sensors, your robot vac-
uum automatically detects drop-offs in front of
it (Fig. 6). If a drop-off is detected it changes
its direction of travel and continues to clean in
the opposite direction.
Lower-level surfaces, such as stairs are de-
tected and thus omitted from the cleaning.
You can adjust the sensitivity of the fall sen-
sors, Chapter 6.1, ‘Adjusting the sensitivity
of the fall sensors’.
A
B
4
A
B
5
6
M607.book Seite 33 Dienstag, 18. Juni 2013 10:44 10