TM
Page 30
Reference manual Foundation Fieldbus Control module
DOC.RM.QC34.E Rev: A
October, 2006
Index
No.
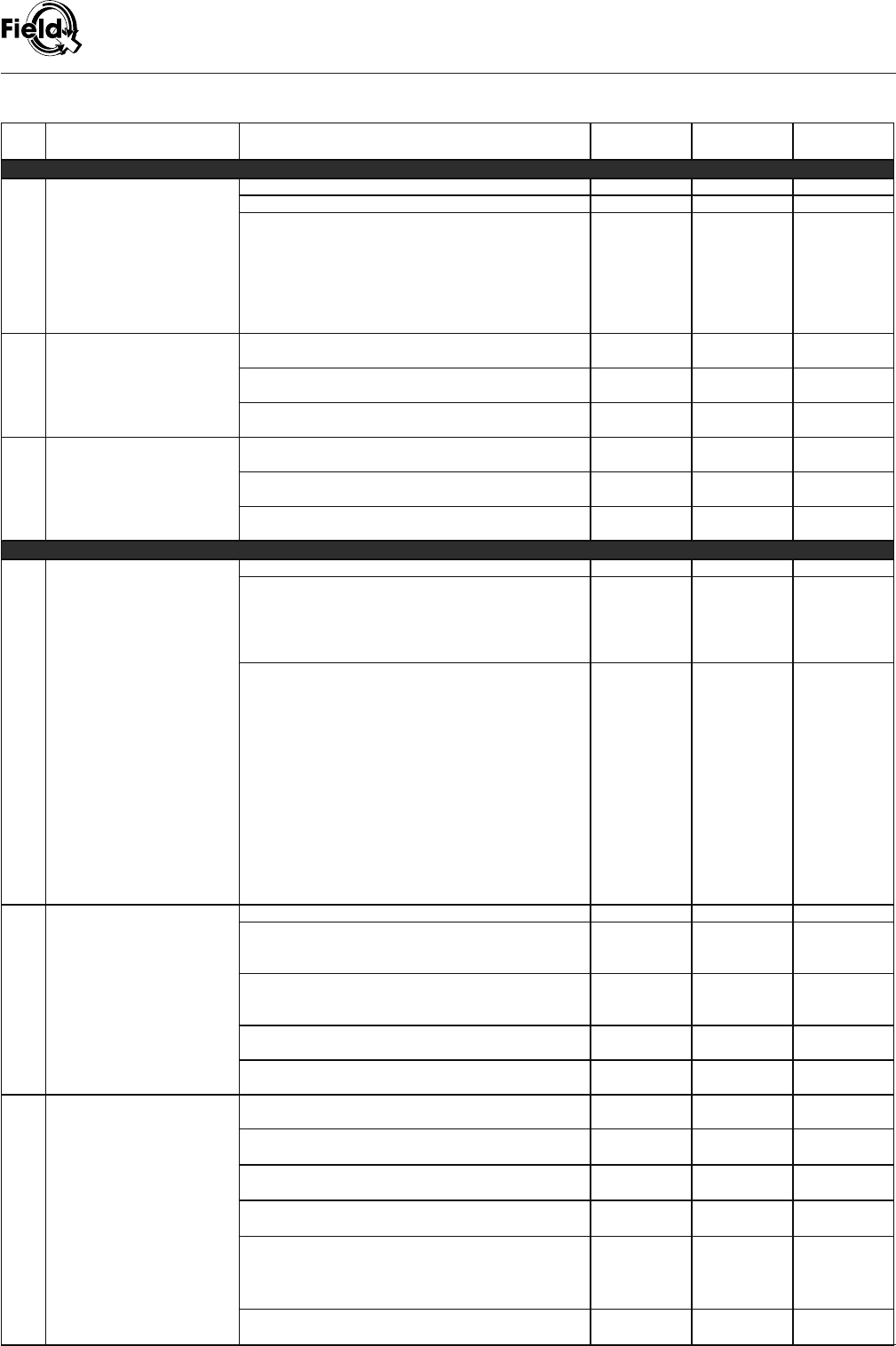
Name Description Valid Range Initial Value Permission
Single signal indicating the current discrete position
STATUS Read only
VALUE
0 = closed,
1 = open,
2 = Closing (based on not being 0 or 1 and the current
position request)
3 = opening (based on not being 0 or 1 and the current
position request)
0 to 3 0 Read only
Discrete position feedback
0: false, 1: true
true/false FALSE
STATUS (bad when loose IO board comms block err,
uncertain sensor error)
Read only
VALUE
0 false, 1: true
0 to 1 0 Read only
Discrete position feedback
0: false, 1: true
true/false FALSE
STATUS (bad when loose IO board comms - block err,
uncertain when sensor bad)
Read only
VALUE
0 false, 1: true
0 to 1 0 Read only
Controls the procedure for finding the endpositions
AUTO_INIT_COMMAND -
0: no action,
1: start auto init
2: start Zero point adjustment,
3: stop auto init
0 to 2 Read / Write
Status of the initialization procedure
- Undetermined, bad repeatability -> increase limit stop
offset
- Running,
- Aborted, -> stopped, by user.
- Undetermined, difference between open and close too
small
- Time Out, -> too long before end-positions are found ->
check air-pressure and actuator sizing
- Range Error -> Difference between open and closed
end position is too small. -> check air-pressure, check
proper valve rotation.
- Successful
- No Valid Data. -> value after default (not initialized)
0 Read only
Set trippoints from endposition
OPEN_END_POSITION use current position as open
end position
0: normal, 1: set
0 to 1 0 Read / Write
CLOSED_END_POSITION use current position as close
end position
0: normal, 1: set
0 to 1 0 Read / Write
OPEN_STOP_OFFSET - distance to endposition
(in ° before end position) Can be set per ° (degree)
5° to 30° 10° Read / Write
CLOSE_STOP_OFFSET - distance to endposition
(in ° before end position) Can be set per ° (degree)
5° to 30° 10° Read / Write
Configures what actions to take after internal
communications are lost.
SHUTDOWN_ENABLE -
0: enable auto recovery,
1: enable manual recovery, 2: disable
0 to 2 1 Read / Write
SHUTDOWN_ACTION -
0: close, 1: open, 2: hold
0 to 2 0 Read / Write
SHUTDOWN_DELAY_TIME -
Time (in sec.) before
action will be taken after event has occurred
1 to 255 4 Read / Write
SHUTDOWN_RESET -
Normally 0, unless
SHUTDOWN_STATUS i
s 1 and
SHUTDOWN_ENABLE
s
et to manual recovery. Manual recovery will then require
this bit to be set to 0
0 to 1 0 Read / Write
SHUTDOWN_STATUS -
Set to 1 when the system is
shutdown, else 0
0 to 1 N/A Read only
SHUTDOWN_CFG
28 AUTO_INITIALIZATION
29 CFG_SWITCH_POINTS
32
Device position status parameters
Device configuration
26 OPEN_STATE
27 CLOSE_STATE
25 DISCRETE_POSITION
Table 4.2 FieldQ™ Transducer Block (continued)





































