209
Special operation and speed control
4
PARAMETERS
(11) Bias and gain calibration for PID displayed values (C42(Pr. 934) to C45(Pr. 935))
When both of C42(Pr. 934) and C44(Pr. 935) ≠ "9999", bias/gain calibration is available for analog value of set
point, measured value, deviation value to perform PID control.
"Bias" / "gain" function can adjust the relation between PID displayed coefficient and measured value input
signal. Examples of measured value input signals are 0 to 5VDC, 0 to 10VDC, or 4 to 20mADC, and they are
externally input.
Set PID display bias coefficient for terminal 4 input with C42(Pr. 934).
(Initial value is the coefficient for 4mA.)
Set PID display gain coefficient for 20mA of the speed command current (4 to 20mA) with C44(Pr. 935).
When both of C42(Pr. 934) and C44(Pr. 935) ≠ "9999" and Pr. 133 is set as the set point, the setting of C42(Pr.
934) is treated as 0%, and C44(Pr. 935) as 100%.
Three methods of bias/gain adjustment for PID displayed values are the following.
(a)Method to adjust any point by application of voltage (current) across the terminals 4 and 5.
(b)Method to adjust any point without application of voltage (current) across terminals 4 and 5.
(c)Method to adjust only the speed without adjusting the voltage (current).
(For the detail of (a) to (c), refer to page 135.
Make adjustment by assuming C7 (Pr. 905) as C45 (Pr. 935), and Pr. 126 as C44 (Pr. 935).)
NOTE
If the RH, RM, RL, REX signal (multi-speed) or JOG signal (Jog operation) is entered with the X14 signal ON, PID
control is stopped and multi-speed or Jog operation is started.
If the setting is as follows, PID control becomes invalid.
Pr. 79 Operation mode selection = "6" (Switchover mode)
The drive unit is at a stop with Pr. 261 Power failure stop selection selected.
Changing the terminal function using any of Pr. 178 to Pr. 182, Pr. 190, Pr. 192 may affect the other functions. Set
parameters after confirming the function of each terminal.
When PID control is selected, the minimum speed is the speed set in Pr. 902 and the maximum speed is the speed set
in Pr. 903.
(Pr. 1 Maximum setting and Pr. 2 Minimum setting settings are also valid.)
The remote operation function is invalid during PID operation.
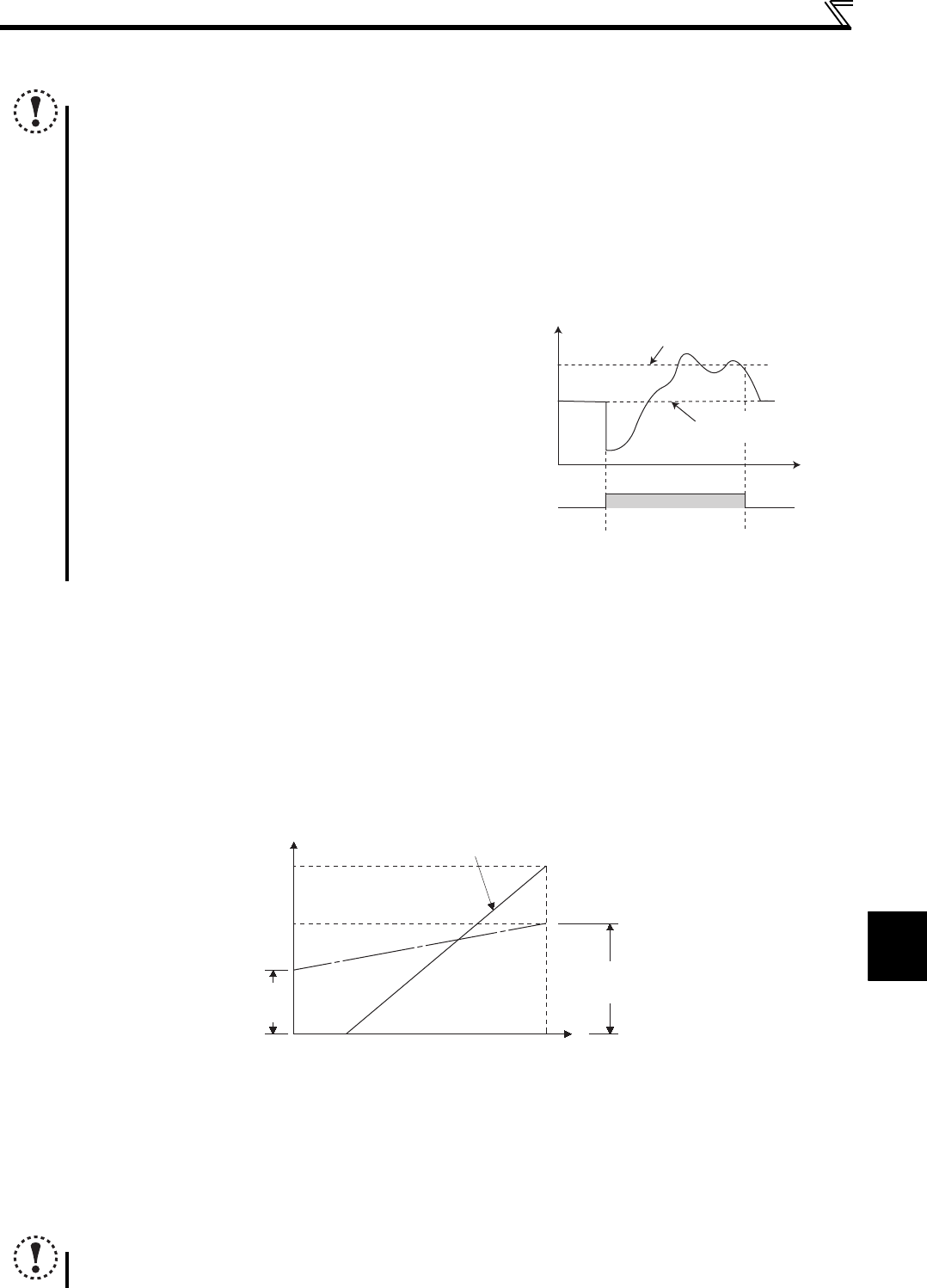
When the control is switched to PID control during normal
operation, the speed command value calculated by PID
operation using 0r/min as standard is used without the
speed during the operation.
NOTE
When the voltage/current input specifications are changed with voltage/current input switch and using Pr. 73 and Pr.
267, be sure to make calibration.
PID action
Speed
command
PID set point
Speed command
during normal operation
ON
Operation when control is switched to PID control
during normal operation
PID operation
Normal
operation
Normal
operation
100
0
Speed setting signal
100%
Initial value
Bias
C42(Pr. 934)
Gain
C44(Pr. 935)
0
20
4 20mA
Coefficient
C43(Pr. 934) C45(Pr. 935)




























































































































































































































































































