K-11
E6581301
11
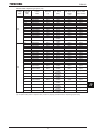
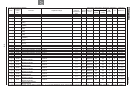
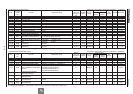
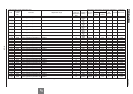
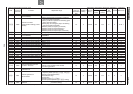
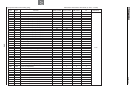
[11] Preset speed operation frequency (8~15) Sensorless vector/vector with sensor (Ɣ:Effective, -:Ineffective)
Title
Communi
cation
No.
Function Adjustment range
setting unit
(Panel/Communi
cation)
Default
setting
Wr
running
PM
control
V/f Reference
Speed
control
Torque
control
H
0287
NN~WN Hz 0.1/0.01 0.0 Enabled Ɣ/Ɣ - Ɣ Ɣ 5. 12
H
0288
NN~WN Hz 0.1/0.01 0.0 Enabled Ɣ/Ɣ - Ɣ Ɣ 5. 12
H
0289
NN~WN Hz 0.1/0.01 0.0 Enabled Ɣ/Ɣ - Ɣ Ɣ 5. 12
H
0290
NN~WN Hz 0.1/0.01 0.0 Enabled Ɣ/Ɣ - Ɣ Ɣ 5. 12
H
0291
NN~WN Hz 0.1/0.01 0.0 Enabled Ɣ/Ɣ - Ɣ Ɣ 5. 12
H
0292
NN~WN Hz 0.1/0.01 0.0 Enabled Ɣ/Ɣ - Ɣ Ɣ 5. 12
H
0293
NN~WN Hz 0.1/0.01 0.0 Enabled Ɣ/Ɣ - Ɣ Ɣ 5. 12
H
0294
frequency 15
Forced operation frequency
NN~WN Hz 0.1/0.01 0.0 Enabled Ɣ/Ɣ - Ɣ Ɣ 5. 12
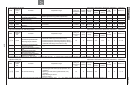
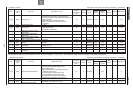
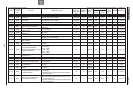
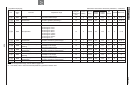
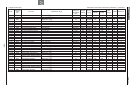
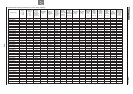
[12] Tripless intensification setup [1/2] Sensorless vector/vector with sensor (Ɣ:Effective, -:Ineffective)
Title
Communi
cation
No.
Function Adjustment range
setting unit
(Panel/Communi
Default
setting
running
PM
control
V/f Reference
Speed
control
Torque
control
EH
WXU
0301 Auto-restart control selection
2:ST ON/OFF switching, 3:1+2, 4:Starting
1/1 0 Disabled Ɣ/Ɣ Ɣ/Ɣ Ɣ Ɣ 5. 18.1
WXE
0302
Regenerative power
ride-through control
2:Deceleration stop during power failure
3:Synchronized deceleration/acceleration
(synchronized acceleration/deceleration signal)
4:Synchronized deceleration/acceleration
(synchronized acceleration/deceleration signal+power
1/1 0 Disabled Ɣ/Ɣ -/- Ɣ Ɣ 5. 18. 2
H
RD
0304 Dynamic braking selection
1:Enabled (braking resistance overload detect)
(braking resistance overload not detect)
1/1 0 Disabled Ɣ/Ɣ Ɣ/Ɣ Ɣ Ɣ 5. 19
H
0305 Overvoltage limit operation
1:Disabled
2:Enabled (quick deceleration)
(dynamic quick deceleration)
1/1 2 Disabled Ɣ/Ɣ Ɣ/Ɣ Ɣ Ɣ 6. 14. 2
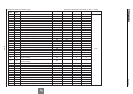
This parameter moves to a fundamental parameter. *1: For 200V-55/75kW models and 400V-90kW to 400V-500kW models, the carrier frequency is between 2.5 and 8.0kHz inclusive.
*2: Default values vary depending on the capacity. See the table of K-48.