16. FULLY CLOSED LOOP SYSTEM
16 - 4
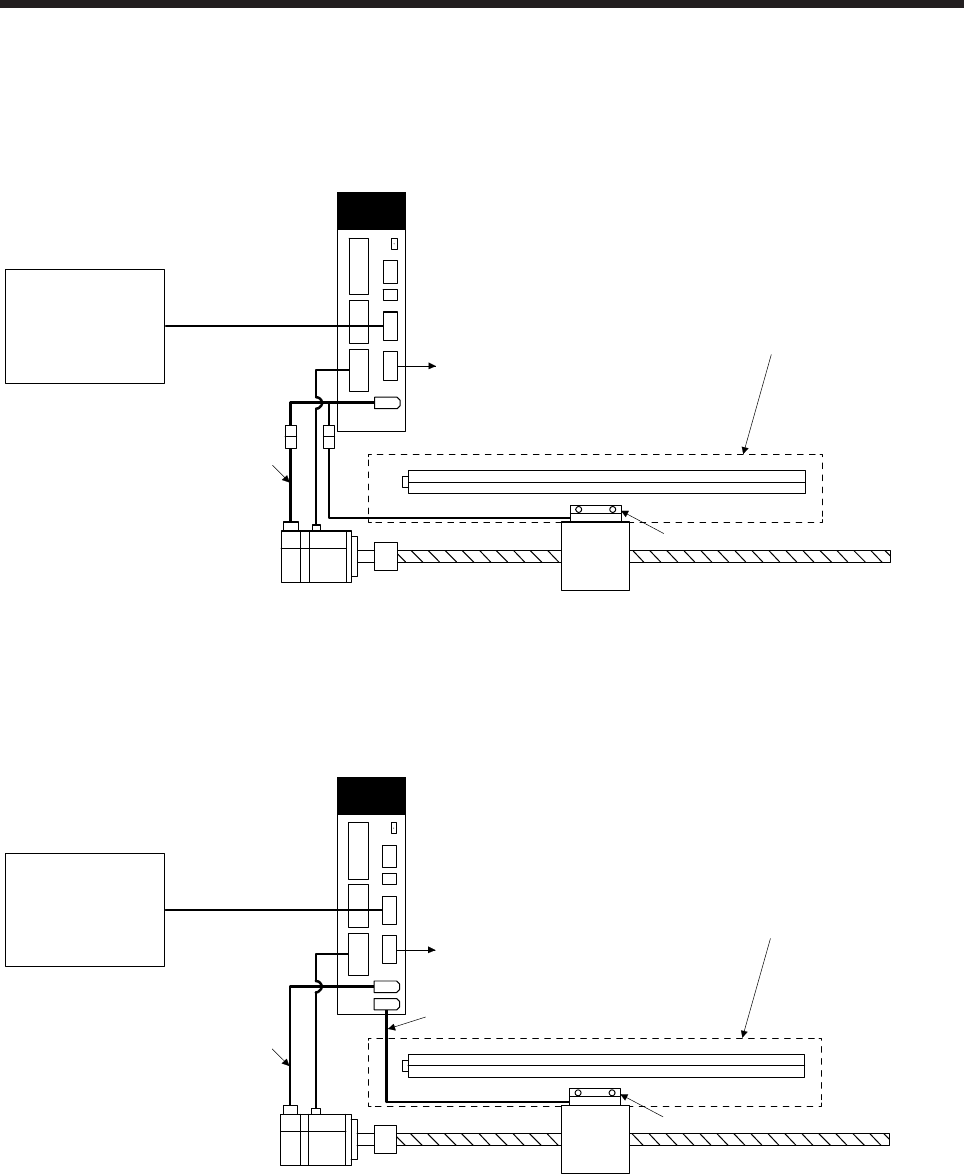
16.1.3 System configuration
(1) For a linear encoder
(a) MR-J4-_B_ servo amplifier
CN2
Servo amplifier
SSCNET III/H controller
SSCNET III/H
Position command
control signal
Table
To the next servo amplifier
(Note)
Two-wire type serial interface compatible linear encoder
Load-side encoder signal
Servo motor encoder signal
Linear encoder head
Servo motor
Note.
pplicable for the absolute position detection system when an absolute position linear encoder is used.
In that case, a battery is not required.
(b) MR-J4-_B_-RJ servo amplifier
CN2
(Note)
A/B/Z-phase pulse train interface compatible linear encoder
or
two-wire/four-wire type serial interface compatible linear encoder
CN2L
(A/B/Z-phase pulse train interface
or serial interface)
Servo amplifier
SSCNET III/H controller
SSCNET III/H
Position command
control signal
Table
To the next servo amplifier
Load-side encoder signal
Servo motor encoder signal
Linear encoder head
Servo motor
Note.
pplicable for the absolute position detection system when an absolute position linear encoder is used.
In that case, a battery is not required.





























































































































































































































































































































































































































































































































































































































































